
WORK 4 MODEL

63 € 10
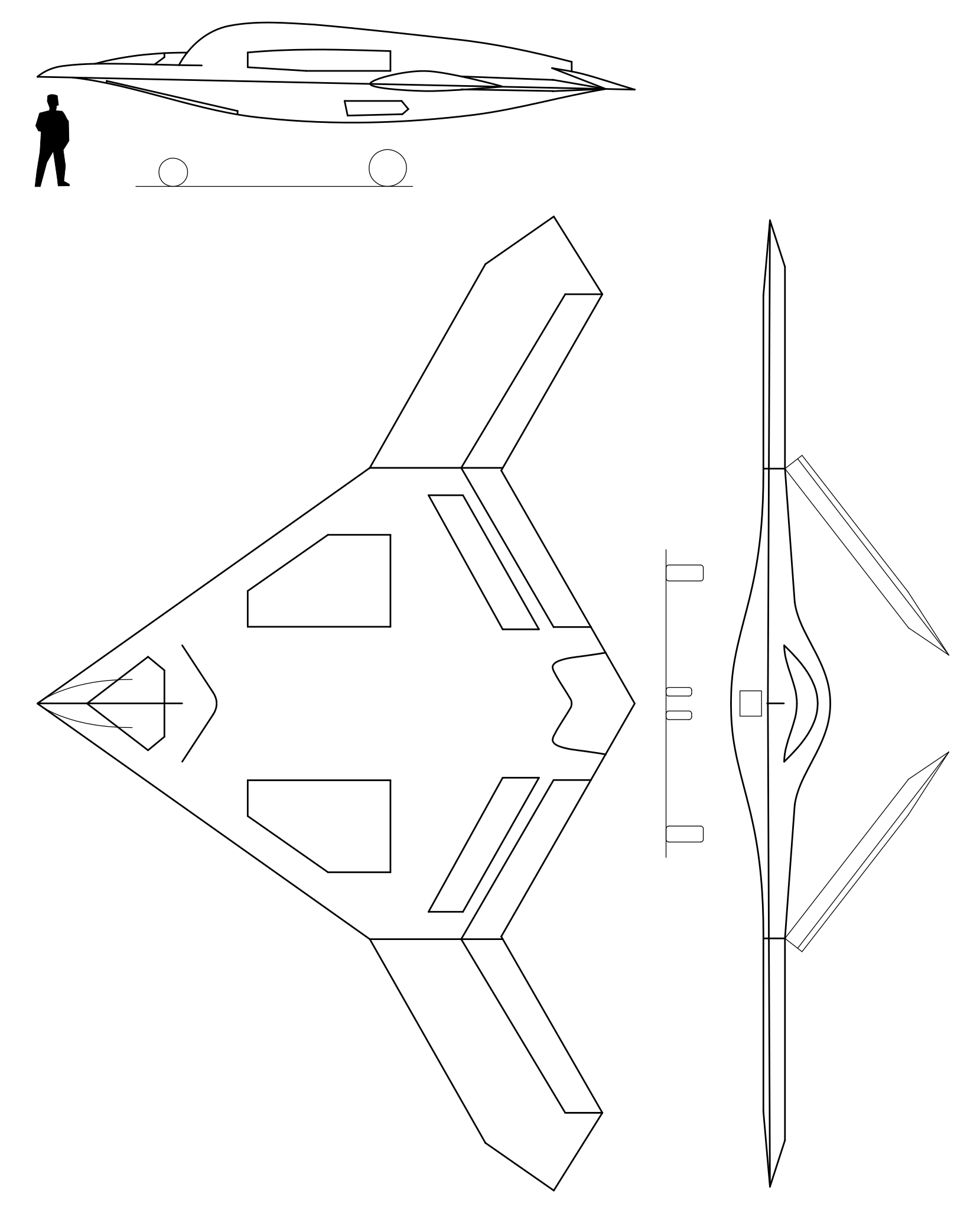
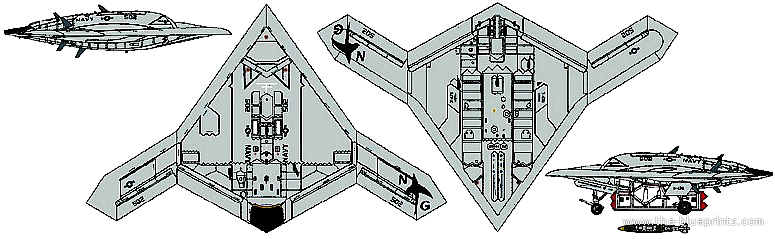
 Le Northrop Grumman X-47B est un véhicule aérien de combat sans pilote (UCAV) de démonstration conçu pour les opérations basées sur des porte-avions. Développé par la société américaine de technologie de défense Northrop Grumman, le projet X-47 a commencé dans le cadre du programme J-UCAS de la DARPA, puis a fait partie du programme de démonstration du système de combat aérien sans pilote (UCAS-D) de la marine américaine. Le X-47B est un avion à réaction sans queue à fuselage mixte capable d’opérer de manière semi-autonome et de se ravitailler en vol.
Le Northrop Grumman X-47B est un véhicule aérien de combat sans pilote (UCAV) de démonstration conçu pour les opérations basées sur des porte-avions. Développé par la société américaine de technologie de défense Northrop Grumman, le projet X-47 a commencé dans le cadre du programme J-UCAS de la DARPA, puis a fait partie du programme de démonstration du système de combat aérien sans pilote (UCAS-D) de la marine américaine. Le X-47B est un avion à réaction sans queue à fuselage mixte capable d’opérer de manière semi-autonome et de se ravitailler en vol.
 Le X-47B a volé pour la première fois en 2011 et, à partir de 2015, ses 2 démonstrateurs actifs ont subi des tests approfondis d’intégration opérationnelle, après avoir effectué avec succès une série de démonstrations terrestres et embarquées. En août 2014, l’US Navy a annoncé qu’elle avait intégré le X-47B dans les opérations de porte-avions aux côtés d’avions habités, et en mai 2015, le programme d’essais primaires a été déclaré terminé. Les démonstrateurs X-47B eux-mêmes étaient destinés à devenir des expositions de musée après avoir terminé les essais en vol, mais la Marine décida plus tard de les maintenir en état de vol en attendant un développement ultérieur.
Le X-47B a volé pour la première fois en 2011 et, à partir de 2015, ses 2 démonstrateurs actifs ont subi des tests approfondis d’intégration opérationnelle, après avoir effectué avec succès une série de démonstrations terrestres et embarquées. En août 2014, l’US Navy a annoncé qu’elle avait intégré le X-47B dans les opérations de porte-avions aux côtés d’avions habités, et en mai 2015, le programme d’essais primaires a été déclaré terminé. Les démonstrateurs X-47B eux-mêmes étaient destinés à devenir des expositions de musée après avoir terminé les essais en vol, mais la Marine décida plus tard de les maintenir en état de vol en attendant un développement ultérieur.
L’US Navy ne s’est pas engagée dans des efforts pratiques de l’UCAS jusqu’en 2000, lorsqu’elle a attribué des contrats de 2 millions de dollars chacun à Boeing et Northrop Grumman pour un programme d’exploration conceptuelle de 15 mois. Les considérations de conception d’un UCAV naval comprenaient la gestion de l’environnement corrosif de l’eau salée, la manutention du pont pour le lancement et la récupération, l’intégration du système de commandement et de contrôle et l’exploitation dans l’environnement à forte interférence électromagnétique d’un porte-avions. La Marine était intéressée par l’utilisation des UCAV pour la reconnaissance, pour pénétrer dans l’espace aérien protégé et identifier des cibles pour des attaques ultérieures. Le X-47A Pegasus de Northrop Grumman, qui a servi de base au X-47B, a volé pour la première fois en 2003. Le programme J-UCAS a pris fin en février 2006 à la suite de l’examen quadriennal de la défense. L’US Air Force et la Navy ont poursuivi leurs propres programmes de drones. La Navy a choisi le X-47B de Northrop Grumman comme programme de démonstrateur de système de combat aérien sans pilote (UCAS-D). Pour fournir des tests réalistes, le démonstrateur a été construit pour être de la même taille et du même poids que l’engin opérationnel projeté, avec une baie d’armes pleine grandeur capable de transporter des missiles existants. L’équipe de l’industrie du X-47B comprenait les sous-traitants Lockheed Martin, Pratt & Whitney, GKN Aerospace, Eaton, General Electric, UTC Aerospace Systems, Dell, Honeywell, Moog, Wind River, Parker Aerospace, Sargent Aerospace & Defense et Rockwell Collins. Le prototype X-47B a été lancé à l’usine 42 de l’armée de l’air à Palmdale, en Californie, le 16 décembre 2008. Son premier vol était prévu pour novembre 2009, mais le projet a pris du retard. Le 29 décembre 2009, Northrop Grumman a supervisé les essais de roulage remorqué de l’avion à l’usine de Palmdale, qui a roulé par ses propres moyens pour la première fois en janvier 2010.
 Le premier vol du démonstrateur X-47B, désigné Air Vehicle 1 (AV-1), a eu lieu à la base aérienne d’Edwards, en Californie, le 4 février 2011. Il a volé pour la première fois en configuration de croisière avec son train d’atterrissage rentré le 30 septembre 2011. Un 2e démonstrateur X-47B, désigné AV-2, a effectué son vol inaugural à la base aérienne d’Edwards le 22 novembre 2011.
Le premier vol du démonstrateur X-47B, désigné Air Vehicle 1 (AV-1), a eu lieu à la base aérienne d’Edwards, en Californie, le 4 février 2011. Il a volé pour la première fois en configuration de croisière avec son train d’atterrissage rentré le 30 septembre 2011. Un 2e démonstrateur X-47B, désigné AV-2, a effectué son vol inaugural à la base aérienne d’Edwards le 22 novembre 2011.
Les 2 X-47B devaient initialement avoir un programme d’essais de 3 ans avec 50 tests à Edwards AFB et NAS Patuxent River, Maryland, culminant avec des essais en mer en 2013. Cependant, ils ont obtenu des résultats si constants que les tests préliminaires se sont terminés après 16 vols. La Navy décida de leur faire faire des démonstrations de lancements et de récupérations de porte-avions, ainsi que de ravitaillement en vol autonome avec une sonde et une drogue. En novembre 2011, la Navy a annoncé que des équipements et des logiciels de ravitaillement en vol seraient ajoutés à un X-47B en 2014 pour des tests. Ils ont également affirmé que les démonstrateurs ne seraient jamais armés. En 2012, Northrop Grumman a testé un système de télécommande portable, conçu pour permettre aux équipes au sol de diriger le X-47B sur le pont du porte-avions.
 En mai 2012, l'AV-1 a commencé des tests d'interférence électromagnétique de haute intensité à Patuxent River, pour tester la compatibilité avec les systèmes de guerre électronique prévus. En juin 2012, l'AV-2 est arrivé à Patuxent River pour commencer une série de tests, notamment des atterrissages arrêtés et des lancements de catapultes, afin de valider sa capacité à effectuer des approches de précision vers un porte-avions. Son premier lancement de catapulte terrestre a été réalisé avec succès le 29 novembre 2012.
En mai 2012, l'AV-1 a commencé des tests d'interférence électromagnétique de haute intensité à Patuxent River, pour tester la compatibilité avec les systèmes de guerre électronique prévus. En juin 2012, l'AV-2 est arrivé à Patuxent River pour commencer une série de tests, notamment des atterrissages arrêtés et des lancements de catapultes, afin de valider sa capacité à effectuer des approches de précision vers un porte-avions. Son premier lancement de catapulte terrestre a été réalisé avec succès le 29 novembre 2012.
 Le 26 novembre 2012, le X-47B a commencé son évaluation à bord du porte-avions USS Harry S. Truman (CVN-75) à la base navale de Norfolk, en Virginie. Le 18 décembre 2012, le X-47B a achevé sa première phase de tests en mer ; il a été remarqué pour ses performances exceptionnelles, s'étant révélé compatible avec le poste de pilotage, les hangars et les systèmes de communication d'un porte-avions. Une fois les tests de pont terminés, le X-47B est retourné au NAS Patuxent River pour des tests supplémentaires. Le 4 mai 2013, il a effectué avec succès un atterrissage arrêté sur un pont porteur simulé à Patuxent River. Le X-47B lancé depuis l'USS George H.W. Bush (CVN-77) le 14 mai 2013 dans l'océan Atlantique, marquant la première fois qu'un drone était catapulté depuis un porte-avions. Le 17 mai 2013, une autre première a été réalisée en effectuant des atterrissages et des décollages posés-décollés depuis le George H.W. Bush en cours.
Le 26 novembre 2012, le X-47B a commencé son évaluation à bord du porte-avions USS Harry S. Truman (CVN-75) à la base navale de Norfolk, en Virginie. Le 18 décembre 2012, le X-47B a achevé sa première phase de tests en mer ; il a été remarqué pour ses performances exceptionnelles, s'étant révélé compatible avec le poste de pilotage, les hangars et les systèmes de communication d'un porte-avions. Une fois les tests de pont terminés, le X-47B est retourné au NAS Patuxent River pour des tests supplémentaires. Le 4 mai 2013, il a effectué avec succès un atterrissage arrêté sur un pont porteur simulé à Patuxent River. Le X-47B lancé depuis l'USS George H.W. Bush (CVN-77) le 14 mai 2013 dans l'océan Atlantique, marquant la première fois qu'un drone était catapulté depuis un porte-avions. Le 17 mai 2013, une autre première a été réalisée en effectuant des atterrissages et des décollages posés-décollés depuis le George H.W. Bush en cours.
 Le 10 juillet 2013, le X-47B a décollé de Patuxent River et a atterri sur le pont du George H.W. Bush, effectuant le tout premier atterrissage arrêté d'un drone sur un porte-avions en mer. Il a ensuite effectué avec succès un 2e atterrissage arrêté sur le George H.W. Bush, mais une 3e tentative a été détournée vers le centre de vol de Wallops en Virginie en raison d'un problème technique. L'un des 3 sous-systèmes de navigation du drone est tombé en panne, ce qui a été identifié par les 2 autres sous-systèmes et signalé à l'opérateur, qui a suivi les procédures pour interrompre l'atterrissage. La Marine a déclaré que la détection du problème démontrait la fiabilité et la capacité du X-47B à fonctionner de manière autonome.
Le 10 juillet 2013, le X-47B a décollé de Patuxent River et a atterri sur le pont du George H.W. Bush, effectuant le tout premier atterrissage arrêté d'un drone sur un porte-avions en mer. Il a ensuite effectué avec succès un 2e atterrissage arrêté sur le George H.W. Bush, mais une 3e tentative a été détournée vers le centre de vol de Wallops en Virginie en raison d'un problème technique. L'un des 3 sous-systèmes de navigation du drone est tombé en panne, ce qui a été identifié par les 2 autres sous-systèmes et signalé à l'opérateur, qui a suivi les procédures pour interrompre l'atterrissage. La Marine a déclaré que la détection du problème démontrait la fiabilité et la capacité du X-47B à fonctionner de manière autonome.
 Le 15 juillet 2013, le 2e X-47B, désigné 501, a été contraint d'interrompre un autre atterrissage prévu sur le George H.W. Bush en raison de problèmes techniques. Les responsables ont affirmé que le programme ne nécessitait qu'un seul atterrissage en mer réussi, bien que les testeurs en visaient 3, tandis que 2 sur 4 ont été réalisés. La Marine a continué à faire voler les 2 X-47B jusqu'en 2014, après avoir été critiquée pour les avoir retirés prématurément. La Marine a ensuite déployé les X-47B sur des porte-avions pour 3 phases de tests supplémentaires entre 2013 et 2015, dans le but de démontrer que les drones pouvaient fonctionner de manière transparente avec une escadre aérienne de 70 avions.
Le 15 juillet 2013, le 2e X-47B, désigné 501, a été contraint d'interrompre un autre atterrissage prévu sur le George H.W. Bush en raison de problèmes techniques. Les responsables ont affirmé que le programme ne nécessitait qu'un seul atterrissage en mer réussi, bien que les testeurs en visaient 3, tandis que 2 sur 4 ont été réalisés. La Marine a continué à faire voler les 2 X-47B jusqu'en 2014, après avoir été critiquée pour les avoir retirés prématurément. La Marine a ensuite déployé les X-47B sur des porte-avions pour 3 phases de tests supplémentaires entre 2013 et 2015, dans le but de démontrer que les drones pouvaient fonctionner de manière transparente avec une escadre aérienne de 70 avions.
 Le 18 septembre 2013, le X-47B a effectué le 100e vol du programme UCAS-D. Les objectifs du programme ont été atteints en juillet et comprenaient un total de 16 approches de précision du poste de pilotage du porte-avions, dont 5 tests de fonctions d'onde, 9 atterrissages posés-décollés, 2 atterrissages arrêtés et 3 lancements de catapultes. Le 10 novembre 2013, les tests se sont poursuivis à bord de l'USS Theodore Roosevelt (CVN-71). Au cours de cette phase, l'environnement numérisé contrôlé par le transporteur du X-47B a été testé, par exemple entre l'UAV et le personnel du transporteur lors des opérations de lancement, de récupération et de vol. Les essais sur le Theodore Roosevelt en 2014 visaient à tester la capacité du drone à décoller, atterrir et se maintenir rapidement parmi des avions pilotés sans perturber les opérations du porte-avions. Il a également utilisé pour la première fois un déflecteur de jet sur le pont, permettant le décollage sans affecter les opérations derrière lui.
Le 18 septembre 2013, le X-47B a effectué le 100e vol du programme UCAS-D. Les objectifs du programme ont été atteints en juillet et comprenaient un total de 16 approches de précision du poste de pilotage du porte-avions, dont 5 tests de fonctions d'onde, 9 atterrissages posés-décollés, 2 atterrissages arrêtés et 3 lancements de catapultes. Le 10 novembre 2013, les tests se sont poursuivis à bord de l'USS Theodore Roosevelt (CVN-71). Au cours de cette phase, l'environnement numérisé contrôlé par le transporteur du X-47B a été testé, par exemple entre l'UAV et le personnel du transporteur lors des opérations de lancement, de récupération et de vol. Les essais sur le Theodore Roosevelt en 2014 visaient à tester la capacité du drone à décoller, atterrir et se maintenir rapidement parmi des avions pilotés sans perturber les opérations du porte-avions. Il a également utilisé pour la première fois un déflecteur de jet sur le pont, permettant le décollage sans affecter les opérations derrière lui.
 Le 10 avril 2014, le X-47B a effectué son premier vol de nuit. Le 17 août 2014, il a décollé et atterri sur le Theodore Roosevelt aux côtés d'un F/A-18 Hornet, marquant la première fois qu'un drone était exploité conjointement avec des avions habités à bord d'un porte-avions. Le Hornet a été lancé depuis le porte-avions, suivi du X-47B. Après un bref vol, le X-47B s'est posé et a immédiatement redémarré pour vérifier le comportement du système. Après 24 minutes, le X-47B a atterri sur le poste de pilotage et a roulé pour donner au Hornet la possibilité d'atterrir. La démonstration a atteint tous les objectifs du test et a marqué la 5e période de test en mer du X-47B, après avoir effectué 8 lancements de catapulte depuis un porte-avions, 30 posés-décollés et 7 atterrissages arrêtés à bord du George H.W. Bush et du Théodore Roosevelt. Les tests se sont terminés avec succès le 24 août 2014, le X-47B effectuant 5 lancements de catapulte, 4 arrestations et 9 atterrissages posés-décollés. Des opérations de roulage de nuit et de manutention ont également été effectuées pour la première fois. Il a atteint son objectif d'effectuer des lancements et des récupérations à intervalles de 90 secondes avec des Hornets habités. En avril 2015, le X-47B a réalisé avec succès le premier ravitaillement aérien entièrement autonome au monde avec un pétrolier Omega Air KC-707 au-dessus de la côte du Maryland. Cela marquait l'achèvement de toutes les tâches de démonstration primaires qui lui étaient demandées.
Le 10 avril 2014, le X-47B a effectué son premier vol de nuit. Le 17 août 2014, il a décollé et atterri sur le Theodore Roosevelt aux côtés d'un F/A-18 Hornet, marquant la première fois qu'un drone était exploité conjointement avec des avions habités à bord d'un porte-avions. Le Hornet a été lancé depuis le porte-avions, suivi du X-47B. Après un bref vol, le X-47B s'est posé et a immédiatement redémarré pour vérifier le comportement du système. Après 24 minutes, le X-47B a atterri sur le poste de pilotage et a roulé pour donner au Hornet la possibilité d'atterrir. La démonstration a atteint tous les objectifs du test et a marqué la 5e période de test en mer du X-47B, après avoir effectué 8 lancements de catapulte depuis un porte-avions, 30 posés-décollés et 7 atterrissages arrêtés à bord du George H.W. Bush et du Théodore Roosevelt. Les tests se sont terminés avec succès le 24 août 2014, le X-47B effectuant 5 lancements de catapulte, 4 arrestations et 9 atterrissages posés-décollés. Des opérations de roulage de nuit et de manutention ont également été effectuées pour la première fois. Il a atteint son objectif d'effectuer des lancements et des récupérations à intervalles de 90 secondes avec des Hornets habités. En avril 2015, le X-47B a réalisé avec succès le premier ravitaillement aérien entièrement autonome au monde avec un pétrolier Omega Air KC-707 au-dessus de la côte du Maryland. Cela marquait l'achèvement de toutes les tâches de démonstration primaires qui lui étaient demandées.
En février 2016, la Marine a décidé de transformer le X-47B d'un avion de surveillance et d'attaque en un drone de reconnaissance et de ravitaillement en vol doté d'une « capacité de frappe limitée ». Ce changement fait suite à un examen et une restructuration de haut niveau du projet de surveillance et d'attaque aéroportée lancé par un transporteur sans pilote (UCLASS), aujourd'hui disparu, les budgets ultérieurs finançant à la place le système de ravitaillement en vol basé sur un transporteur MQ-25 Stingray (CBARS).
Le projet a été initialement financé dans le cadre d'un contrat de 635,8 millions de dollars attribué par la Marine en 2007. En janvier 2012, le coût total du programme du X-47B était estimé à 813 millions de dollars. Le financement gouvernemental pour le programme X-47B UCAS-D devait s'épuiser fin septembre 2013, à la fin de l'exercice financier. Cependant, en juin 2014, la Marine a fourni 63 millions de dollars supplémentaires pour le développement « post-démonstration » du X-47B.
 En février 2015, la Marine a déclaré que la concurrence pour les appels d'offres privés pour la construction de la flotte UCLASS débuterait en 2016, les avions devant entrer en service au début des années 2020. Apparemment, malgré le succès du X-47B lors des vols d'essai, les responsables craignaient qu'il ne soit trop coûteux et pas assez furtif pour les besoins du projet UCLASS. En avril 2015, il a été rapporté que les démonstrateurs X-47B deviendraient des expositions de musée une fois les essais en vol terminés. En juin 2015, le secrétaire américain à la Marine, Ray Mabus, a déclaré que le programme X-47B devrait se poursuivre mais que Northrop-Grumman ne devrait pas obtenir un avantage injuste dans la compétition pour le contrat UCLASS. En juillet 2015, la Marine a déclaré que les X-47B resteraient en état de vol plutôt que d'être convertis en expositions de musée, permettant ainsi diverses évaluations de suivi.
En février 2015, la Marine a déclaré que la concurrence pour les appels d'offres privés pour la construction de la flotte UCLASS débuterait en 2016, les avions devant entrer en service au début des années 2020. Apparemment, malgré le succès du X-47B lors des vols d'essai, les responsables craignaient qu'il ne soit trop coûteux et pas assez furtif pour les besoins du projet UCLASS. En avril 2015, il a été rapporté que les démonstrateurs X-47B deviendraient des expositions de musée une fois les essais en vol terminés. En juin 2015, le secrétaire américain à la Marine, Ray Mabus, a déclaré que le programme X-47B devrait se poursuivre mais que Northrop-Grumman ne devrait pas obtenir un avantage injuste dans la compétition pour le contrat UCLASS. En juillet 2015, la Marine a déclaré que les X-47B resteraient en état de vol plutôt que d'être convertis en expositions de musée, permettant ainsi diverses évaluations de suivi.
 En janvier 2017, le premier X-47B a quitté la NAS Patuxent River, dans le Maryland, pour l'usine de fabrication de Northrop Grumman à Palmdale, en Californie. En août 2017, Aviation Week a publié des photos d'un X-47B modifié comme banc d'essai pour l'offre MQ-25 de Northrop Grumman. Le 25 octobre 2017, la société a annoncé son retrait du concours MQ-25, affirmant qu'elle ne serait pas en mesure d'opérer selon les termes de l'appel d'offres du service. Une démonstration modifiée du système de manutention du pont était prévue, mais les efforts ont été suspendus. Un X-47B a effectué un fonctionnement statique du moteur d'entretien requis au printemps 2019. L'autre est resté stocké dans un hangar. L'ancien véhicule aérien X-47A Pegasus était également conservé dans un hangar couvert en plein air à Palmdale. Le grand public ne peut pas entrer dans les installations de Palmdale.
En janvier 2017, le premier X-47B a quitté la NAS Patuxent River, dans le Maryland, pour l'usine de fabrication de Northrop Grumman à Palmdale, en Californie. En août 2017, Aviation Week a publié des photos d'un X-47B modifié comme banc d'essai pour l'offre MQ-25 de Northrop Grumman. Le 25 octobre 2017, la société a annoncé son retrait du concours MQ-25, affirmant qu'elle ne serait pas en mesure d'opérer selon les termes de l'appel d'offres du service. Une démonstration modifiée du système de manutention du pont était prévue, mais les efforts ont été suspendus. Un X-47B a effectué un fonctionnement statique du moteur d'entretien requis au printemps 2019. L'autre est resté stocké dans un hangar. L'ancien véhicule aérien X-47A Pegasus était également conservé dans un hangar couvert en plein air à Palmdale. Le grand public ne peut pas entrer dans les installations de Palmdale.
En mars 2014, le X-47B a remporté le 57e prix annuel des lauréats pour ses « réalisations extraordinaires » dans le domaine de l'aéronautique et de la propulsion, organisé par Aviation Week. Le 9 avril 2014, la National Aeronautic Association a sélectionné Northrop Grumman, la marine américaine et l'équipe de développement du X-47B comme récipiendaires conjoints du Trophée Collier 2013 pour l'excellence en technologie aéronautique.
La Marine a utilisé le logiciel du X-47B pour démontrer les capacités de ravitaillement aérien sans pilote. Le 28 août 2013, un Learjet 25 piloté par Calspan a fait le plein à partir d'un avion-citerne Boeing 707 tout en volant de manière autonome en tant qu'avion de substitution doté de la technologie du X-47B. Le test visait à démontrer que les avions sans pilote et éventuellement avec pilote peuvent avoir une capacité de ravitaillement en vol automatisé, augmentant considérablement leur portée, leur persistance et leur flexibilité. Les projets visant à démontrer davantage le ravitaillement aérien autonome auraient été réduits dans le budget de la Marine pour l'exercice 2014, mais le X-47B a néanmoins mené avec succès une démonstration de ravitaillement autonome en avril 2015.








| X-47B - Stealth Strike Fighter par Haci Productions |
Meet the X-47B: America's $1.5 Billion Stealth Drone par US Military News |
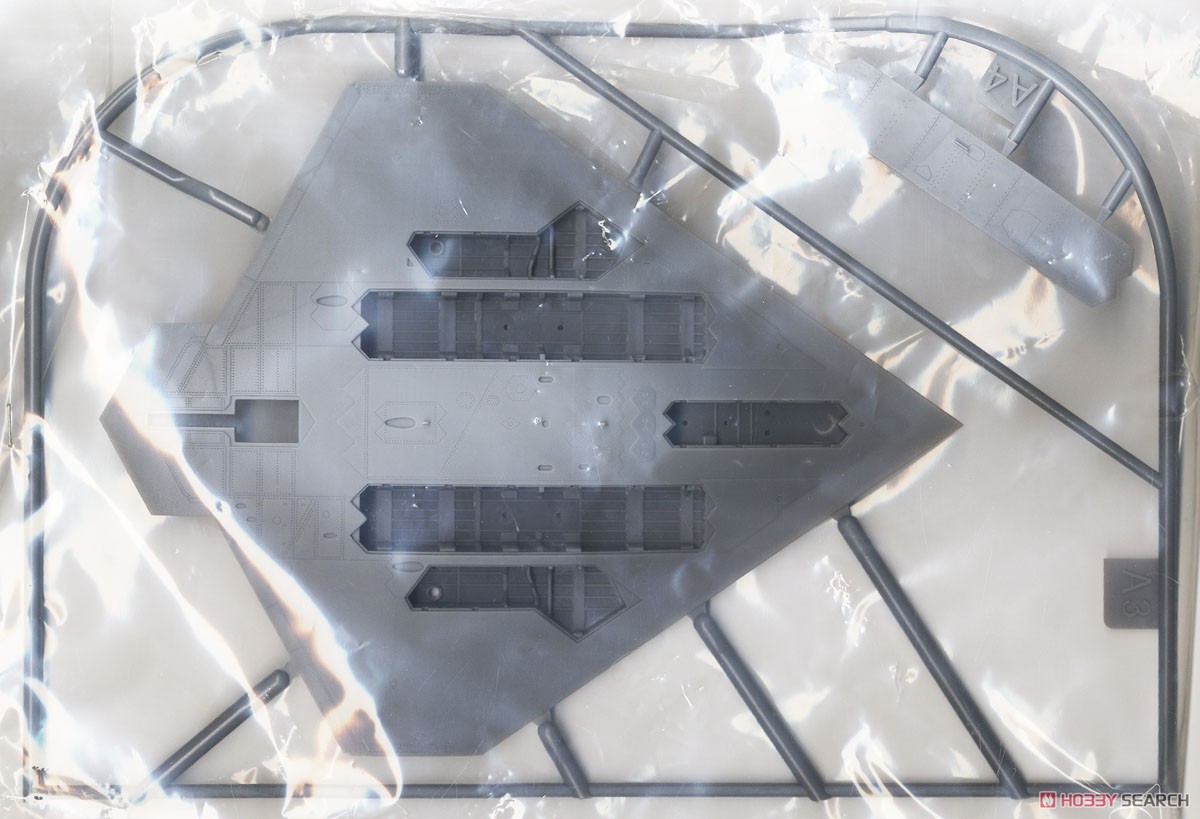
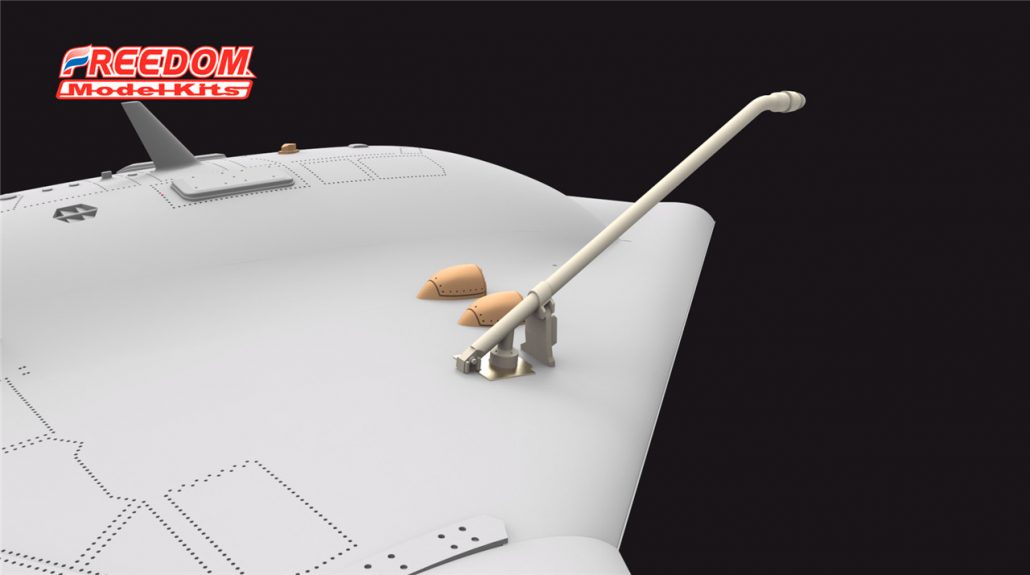
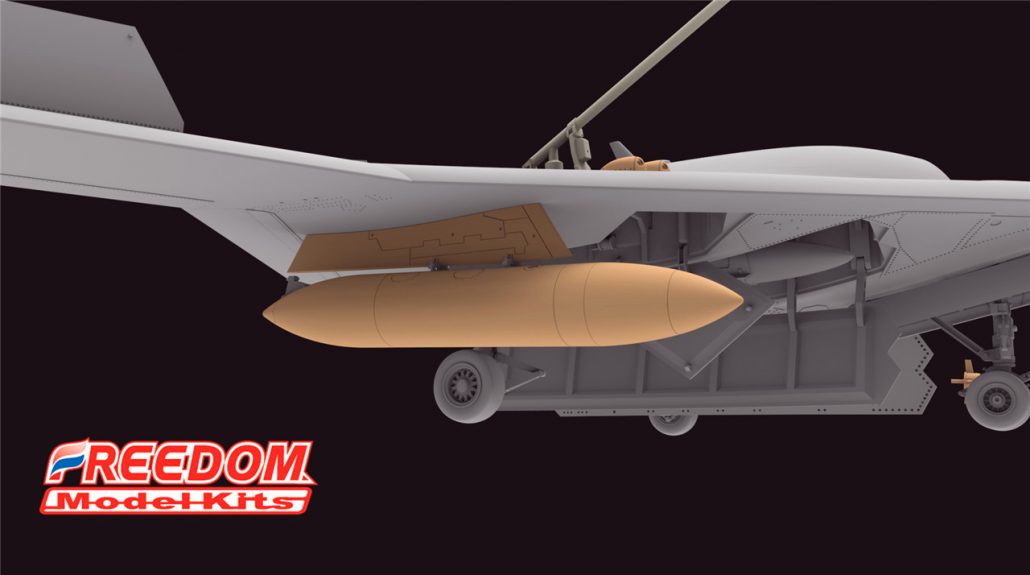
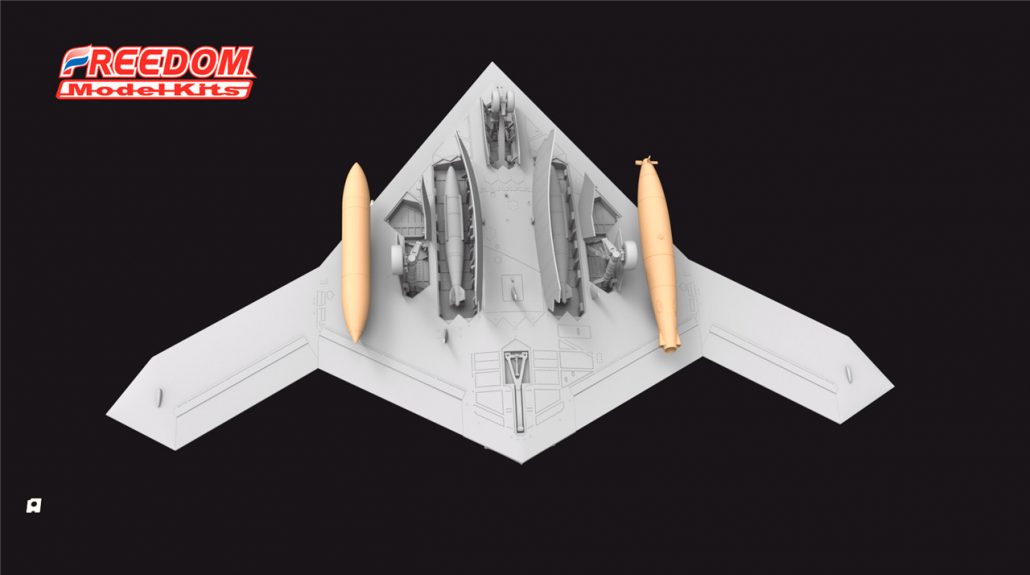
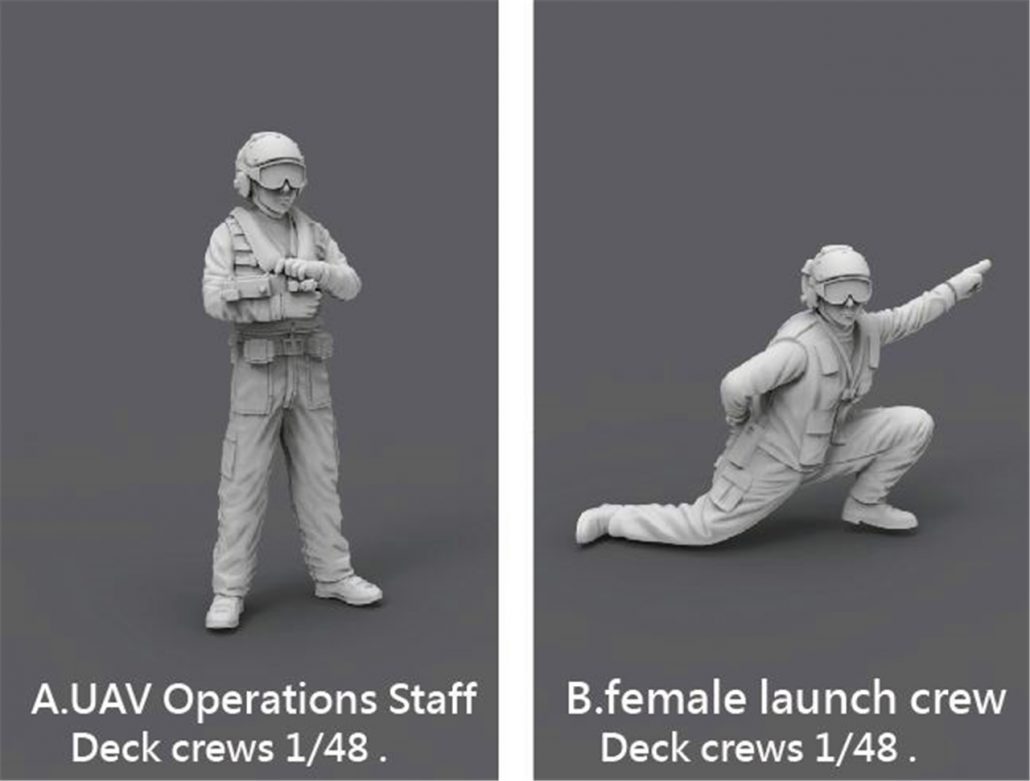
Ce kit en édition limitée est livré avec 2 figurines en résine et représente le X-47B s'il avait été rénové en tant qu'avion de ravitaillement en vol. La soute du train d'atterrissage et la soute à armes peuvent être sélectionnées ouvertes ou fermées ; des décalcomanies pour plusieurs marquages sont inclus, tout comme les pièces photodécoupées.






Vous pouvez le trouver pour l'instant sur :
 Hobby Link Japan à 48€67
Hobby Link Japan à 48€67
 Exito à 56€80
Hobby Search à 57€10 (9,215 yen)
Exito à 56€80
Hobby Search à 57€10 (9,215 yen)
 DominoModel à 59€
DominoModel à 59€
 OupsModel à 63€10
OupsModel à 63€10
Remarque : Les prix et la disponibilité ne sont donnés qu’à titre indicatif.
